




Sistem pengukuran sikap




Ciri-ciri Produk
MS-100A0 ialah sikap tiga darjah kebebasan berdasarkan teknologi mikro-mekanikal (MEMS)
Sistem pengukuran, giroskop MEMS berprestasi tinggi terbina dalam dan pecutan MEMS, melalui algoritma penapisan mengira sudut pic, sudut gulung dan sudut tajuk pembawa dalam masa nyata.juga dipadankan secara pilihan dengan magnetometer untuk mencapai penemuan utara berketepatan tinggi, dan keluaran halaju sudut 3 paksi dan pecutan 3 paksi digunakan untuk kawalan gerakan.
Ciri Produk
- Lebih baik daripada ketepatan sikap 0.1°
- Julat ukuran sikap ±90°
- Julat suhu operasi: -40~65℃
- Persekitaran getaran: 10~2000Hz, 6g (RMS)
- Jenis antara muka yang kaya, menyokong RS232, RS422, CAN dan antara muka standard yang lain
- Reka bentuk meterai kalis air
Ciri-ciri Elektrik
- Bekalan kuasa: 5V (jenis), input voltan lebar boleh disesuaikan 12~36V
- Kuasa dinilai: 0.5W (maks)
- Riak: 100mV (puncak ke puncak)
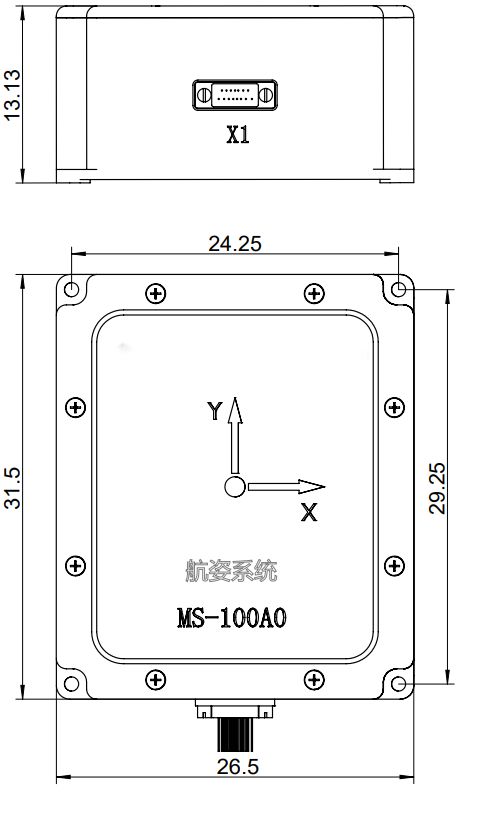
Dimensi Mekanikal
Penunjuk teknikal
| Parameter giro | ||||
| Parameter |
Keadaan ujian | Nilai biasa |
Nilai maks | Unit |
| Julat pengukuran dinamik |
|
| 450 | º/s |
| Kestabilan berat sebelah sifar | Varians Allan, paksi Z | 0.8 |
| º/j |
| Varians Allan, paksi-X dan paksi-Y | 1.6 |
| º/j | |
| Purata 10s, paksi X, Y (-40℃~+80℃, suhu malar) | 6 |
| º/j | |
| Purata 1s, paksi X, Y (-40℃~+80℃, suhu malar) | 9 |
| º/j | |
| Offset sifar | Julat offset sifar | ±0.2 |
| º/s |
| Perubahan bias sifar pada julat suhu penuh | ±0.06 |
| º/s | |
| Kebolehulangan mula-untuk-mula | 0.006 |
| º/s | |
| Pengulangan permulaan hari ke hari | 0.009 |
| º/s | |
| Pengaruh Pecutan Linear ke atas Pincang Sifar | 0.002 |
| º/s | |
| Pengaruh getaran pada offset sifar, perubahan sebelum dan selepas getaran | 0.002 |
| º/s | |
| Pengaruh getaran pada offset sifar, perubahan sebelum getaran | 0.002 |
| º/s | |
| Faktor skala | Ketepatan faktor skala, paksi Z | 0.3 |
| % |
| Ketepatan faktor skala, paksi X, Y | 0.6 |
| % | |
| Ketaklinearan faktor skala, paksi Z | 0.01 |
| %FS | |
| Ketaklinearan faktor skala, paksi X, Y | 0.02 |
| %FS | |
| Berjalan secara rawak sudut |
| 0.001 |
| °/√jam |
|
Ketumpatan bunyi |
| 0.001 |
| °/s/√jam |
| Resolusi |
| 3.052×10−7 |
| º/s/LSB |
| Lebar jalur |
| 200 |
| Hz |
| Parameter pecutan | ||||
| Parameter |
Keadaan ujian |
Nilai biasa | Nilai maks | Unit |
| Julat pengukuran dinamik |
| 16 |
| g |
| Kestabilan berat sebelah sifar | varians Allan | 0.03 |
| mg |
| Purata 10s (-40℃~+80℃, suhu malar) | 0.2 |
| mg | |
| Purata 1s (-40℃~+80℃, suhu malar) | 0..3 |
| mg | |
| Offset sifar | Julat offset sifar | 5 |
| mg |
|
Variasi offset sifar (puncak ke puncak) pada julat suhu penuh | 5 |
| mg | |
| Kebolehulangan mula-untuk-mula | 0.5 |
| mg | |
| Pengulangan permulaan hari ke hari | 0.8 |
| mg | |
| Pekali Suhu Sifar Bias | 0.05 | 0.1 | mg/℃ | |
| Faktor skala | Ketepatan faktor skala | 0.5 |
| % |
| Ketaklinearan faktor skala | 0.1 |
| %FS | |
| Laju jalan rawak |
| 0.029 |
| m/s/√jam |
| Ketumpatan bunyi |
| 0.025 |
| mg/√Hz |
| Resolusi |
| 1.221×10−8 |
| g/LSB |
| Lebar jalur |
| 200 |
| Hz |
| Parameter magnetometer (pilihan) | ||||
| Parameter | Keadaan ujian |
Nilai biasa | Nilai maks |
Unit |
| Julat pengukuran dinamik |
| 2.5 |
| gauss |
| Offset sifar | Persekitaran bukan magnet | 15 |
| mgauss |
| Ketepatan tajuk | ||||
| Ketepatan tajuk magnetik |
| 0.5 |
| ° |
| Ketepatan sikap mendatar | ||||
|
Ketepatan sudut padang |
| 0.1 |
| ° |
| Ketepatan sudut gulung |
| 0.1 |
| ° |
| Parameter giro | ||||
| Parameter |
Keadaan ujian | Nilai biasa |
Nilai maks | Unit |
| Julat pengukuran dinamik |
|
| 450 | º/s |
| Kestabilan berat sebelah sifar | Varians Allan, paksi Z | 0.8 |
| º/j |
| Varians Allan, paksi-X dan paksi-Y | 1.6 |
| º/j | |
| Purata 10s, paksi X, Y (-40℃~+80℃, suhu malar) | 6 |
| º/j | |
| Purata 1s, paksi X, Y (-40℃~+80℃, suhu malar) | 9 |
| º/j | |
| Offset sifar | Julat offset sifar | ±0.2 |
| º/s |
| Perubahan bias sifar pada julat suhu penuh | ±0.06 |
| º/s | |
| Kebolehulangan mula-untuk-mula | 0.006 |
| º/s | |
| Pengulangan permulaan hari ke hari | 0.009 |
| º/s | |
| Pengaruh Pecutan Linear ke atas Pincang Sifar | 0.002 |
| º/s | |
| Pengaruh getaran pada offset sifar, perubahan sebelum dan selepas getaran | 0.002 |
| º/s | |
| Pengaruh getaran pada offset sifar, perubahan sebelum getaran | 0.002 |
| º/s | |
| Faktor skala | Ketepatan faktor skala, paksi Z | 0.3 |
| % |
| Ketepatan faktor skala, paksi X, Y | 0.6 |
| % | |
| Ketaklinearan faktor skala, paksi Z | 0.01 |
| %FS | |
| Ketaklinearan faktor skala, paksi X, Y | 0.02 |
| %FS | |
| Berjalan secara rawak sudut |
| 0.001 |
| °/√jam |
|
Ketumpatan bunyi |
| 0.001 |
| °/s/√jam |
| Resolusi |
| 3.052×10−7 |
| º/s/LSB |
| Lebar jalur |
| 200 |
| Hz |
| Parameter pecutan | ||||
| Parameter |
Keadaan ujian |
Nilai biasa | Nilai maks | Unit |
| Julat pengukuran dinamik |
| 16 |
| g |
| Kestabilan berat sebelah sifar | varians Allan | 0.03 |
| mg |
| Purata 10s (-40℃~+80℃, suhu malar) | 0.2 |
| mg | |
| Purata 1s (-40℃~+80℃, suhu malar) | 0..3 |
| mg | |
| Offset sifar | Julat offset sifar | 5 |
| mg |
|
Variasi offset sifar (puncak ke puncak) pada julat suhu penuh | 5 |
| mg | |
| Kebolehulangan mula-untuk-mula | 0.5 |
| mg | |
| Pengulangan permulaan hari ke hari | 0.8 |
| mg | |
| Pekali Suhu Sifar Bias | 0.05 | 0.1 | mg/℃ | |
| Faktor skala | Ketepatan faktor skala | 0.5 |
| % |
| Ketaklinearan faktor skala | 0.1 |
| %FS | |
| Laju jalan rawak |
| 0.029 |
| m/s/√jam |
| Ketumpatan bunyi |
| 0.025 |
| mg/√Hz |
| Resolusi |
| 1.221×10−8 |
| g/LSB |
| Lebar jalur |
| 200 |
| Hz |
| Parameter magnetometer (pilihan) | ||||
| Parameter | Keadaan ujian |
Nilai biasa | Nilai maks |
Unit |
| Julat pengukuran dinamik |
| 2.5 |
| gauss |
| Offset sifar | Persekitaran bukan magnet | 15 |
| mgauss |
| Ketepatan tajuk | ||||
| Ketepatan tajuk magnetik |
| 0.5 |
| ° |
| Ketepatan sikap mendatar | ||||
|
Ketepatan sudut padang |
| 0.1 |
| ° |
| Ketepatan sudut gulung |
| 0.1 |
| ° |


