Sistem Navigasi Inersia Pengindeksan Dua Paksi RLG




Penerangan Produk
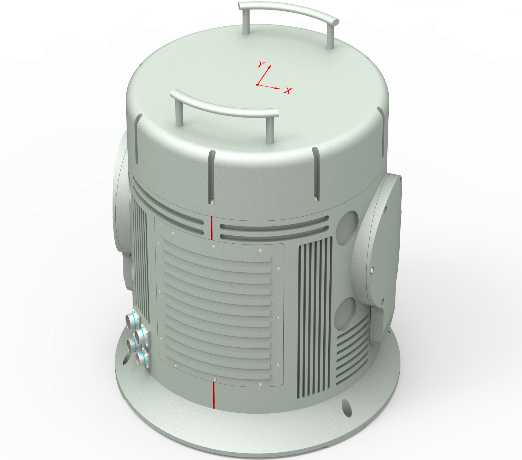
Sistem Navigasi Inersia RL2-90, penyelesaian canggih untuk navigasi yang tepat.Dilengkapi dengan giroskop laser cincin jenis 90 dan pecutan fleksibel kuarza, ia memberikan maklumat kelajuan, kedudukan dan sikap yang tepat.Ia berintegrasi dengan lancar dengan GNSS, altimeter dan meter kelajuan udara, menjadikannya sesuai untuk pembawa udara dan darat.Sama ada dalam kereta kebal, kenderaan berperisai, pesawat, dron, kapal atau kereta api berkelajuan tinggi, sistem ini memastikan kawalan penerbangan yang boleh dipercayai, penstabilan sikap dan kedudukan.Dengan ketepatan yang tinggi dalam kedua-dua navigasi inersia tulen dan mod navigasi bersepadu, RL2-90 ialah rakan kongsi anda yang dipercayai untuk navigasi yang boleh dipercayai dan tepat dalam pelbagai aplikasi.
PCIRI-CIRI RODUCT
l Mekanisme pengindeksan dua paksi untuk mengurangkan ralat
l Gyro laser gelang ketepatan tinggi dan pecutan kuarza
l Penjajaran diri asas statik atau bergerak pilihan
l Penentukuran dan pampasan parameter ralat dalam julat suhu penuh
l Antara muka input pelbagai pilihan untuk GNSS/Odometer/DVL
l Mod navigasi boleh dikonfigurasikan
l Kesesuaian alam sekitar yang sangat baik
l Piawaian ketenteraan
AKAWASAN PPLICATION
l Navigasi kenderaan bawah laut
l Kedudukan dan pencarian utara untuk kenderaan darat
l Penstabilan dan kawalan untuk pembawa bergerak
l Pengukuran sikap untuk aplikasi yang menuntut
MFUNGSI AIN
l Ia mempunyai fungsi mengeluarkan maklumat seperti kedudukan pembawa, tajuk, sudut sikap, kadar sudut dan kelajuan dalam masa nyata;
l Ia mempunyai mod kerja seperti navigasi inersia tulen dan navigasi bersepadu INS/GNSS (termasuk Beidou);
l Mempunyai fungsi menerima maklumat navigasi satelit yang disediakan oleh peralatan standard frekuensi sistem masa luaran;
l Ia mempunyai fungsi penjajaran diri tanah dan menyokong fungsi penjajaran udara;
l Ia mempunyai fungsi seperti ujian kendiri kuasa hidup, ujian kendiri berkala, laporan status, pampasan ralat pemasangan dan storan tidak meruap.
PPETUNJUK PRESTASI
| Ketepatan sistem Ketepatan Sistem | Navigasi Inersia Tulen/Navigasi Inersia Tulen | 2.0nmile/5h, PUNCAK | |
| Navigasi/Navigasi Bersepadu dengan GNSS | ≤5m , 1σ | ||
| Sudut Tajuk / Tajuk | 0.01°, RMS | ||
| Sikap mendatar (roll dan pitch) Sikap Mendatar (roll & pitch) | 0.005°, RMS | ||
| Halaju Inersia Tulen | 1.0 m/s , RMS | ||
| GNSS Navigasi Bersepadu Halaju | 0. 1 m/s , RMS | ||
| Petunjuk bagi peranti inersia Parameter Gyro dan Accelerometer | giroskop laser _ Giroskop | Julat/Julat | ± 6 00 deg/s |
| Kestabilan Bias | ≤0.002 deg/j, 1σ | ||
| Kebolehulangan Bias | ≤0.002 deg/j, 1σ | ||
| Faktor Skala bukan lineariti | 1 ppm | ||
| Accelerometer Accelerometer | Julat/Julat | ± 15g | |
| Kestabilan Bias | ≤10μg , 1σ | ||
| Kebolehulangan bias sifar Kebolehulangan Bias | ≤10μg , 1σ | ||
| Faktor Skala bukan lineariti | 15 ppm | ||
| menyelaraskan masa Masa Penjajaran | Mula Dingin | ≤ 15 min | |
| Mula semula | ≤ 10 min | ||
| Permulaan Udara/Dalam Penerbangan | ≤15min | ||
| Jam bekerja Masa Operasi | Masa kerja berterusan/Waktu Operasi | lebih daripada 10j | |
| Ciri Antara Muka antara muka | Bekalan voltan/Voltan | 18~36VDC | |
| Penggunaan kuasa | ≤ 40W @ 24VDC | ||
| Antara muka elektrik/Elektrik | RS232 × 2 RS422 × 3 BOLEH × 2 Ethernet × 1 1pps × 1 | ||
| Kadar Kemas Kini Data (boleh dikonfigurasikan) | 200Hz@115.2kbps | ||
| Gunakan persekitaran alam sekitar | Suhu Operasi | -40°C~+65°C | |
| Suhu penyimpanan/Suhu Penyimpanan | -55°C~+85°C | ||
| Gunakan Ketinggian/Ketinggian | 20000m | ||
| Kelembapan | 95% (+25°C) | ||
| Getaran/Getaran | 5g @ 20~2000Hz | ||
| Syok/Syok | 40 g, 11 ms, 1/2 Sinus | ||
| Ciri-ciri fizikal Fizikal | Dimensi/ Saiz (Φ*H) | 540 x 536mm | |
| Berat/ Berat | 55 kg | ||
Nota: Struktur boleh disesuaikan mengikut keperluan pengguna.